
KAPASITOR (KONDENSATOR)
Kapasitor (Kondensator) yang dalam rangkaian elektronika dilambangkan dengan huruf “C” adalah suatu alat yang dapat menyimpan energi/muatan listrik di dalam medan listrik, dengan cara mengumpulkan ketidakseimbangan internal dari muatan listrik. Kapasitor ditemukan oleh Michael Faraday (1791-1867). Satuan kapasitor disebut Farad (F). Satu Farad = 9 x 1011 cm2 yang artinya luas permukaan kepingan tersebut.
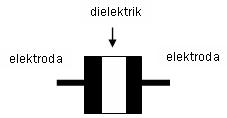
Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini tersimpan selama tidak ada konduksi pada ujung-ujung kakinya. Di alam bebas, phenomena kapasitor ini terjadi pada saat terkumpulnya muatan-muatan positif dan negatif di awan.
1.1. Kapasitansi
Kapasitansi didefinisikan sebagai kemampuan dari suatu kapasitor untuk dapat menampung muatan elektron. Coulombs pada abad 18 menghitung bahwa 1 coulomb = 6.25 x 1018 elektron. Kemudian Michael Faraday membuat postulat bahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1 farad jika dengan tegangan 1 volt dapat memuat muatan elektron sebanyak 1 coulombs. Dengan rumus dapat ditulis :
Q = C V
Q = muatan elektron dalam C (coulombs)
C = nilai kapasitansi dalam F (farad)
V = besar tegangan dalam V (volt)
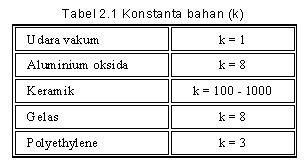
Dalam praktek pembuatan kapasitor, kapasitansi dihitung dengan mengetahui luas area plat metal (A), jarak (t) antara kedua plat metal (tebal dielektrik) dan konstanta (k) bahan dielektrik. Dengan rumus dapat di tulis sebagai berikut :
C = (8.85 x 10-12) (k A/t)
Berikut adalah tabel contoh konstanta (k) dari beberapa bahan dielektrik yang disederhanakan.
Untuk rangkaian elektronik praktis, satuan farad adalah sangat besar sekali. Umumnya kapasitor yang ada di pasaran memiliki satuan : µF, nF dan pF.
1 Farad = 1.000.000 µF (mikro Farad)
1 µF = 1.000.000 pF (piko Farad)
1 µF = 1.000 nF (nano Farad)
1 nF = 1.000 pF (piko Farad)
1 pF = 1.000 µµF (mikro-mikro Farad)
1 µF = 10-6 F
1 nF = 10-9 F
1 pF = 10-12 F
Konversi satuan penting diketahui untuk memudahkan membaca besaran sebuah kapasitor. Misalnya 0.047µF dapat juga dibaca sebagai 47nF, atau contoh lain 0.1nF sama dengan 100pF.
Kondensator diidentikkan mempunyai dua kaki dan dua kutub yaitu positif dan negatif serta memiliki cairan elektrolit dan biasanya berbentuk tabung.

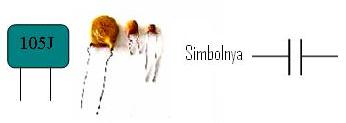
Sedangkan jenis yang satunya lagi kebanyakan nilai kapasitasnya lebih rendah, tidak mempunyai kutub positif atau negatif pada kakinya, kebanyakan berbentuk bulat pipih berwarna coklat, merah, hijau dan lainnya seperti tablet atau kancing baju yang sering disebut kapasitor (capacitor).
2.2 Wujud dan Macam Kondensator
Berdasarkan kegunaannya kondensator di bagi menjadi :
1. Kondensator tetap (nilai kapasitasnya tetap tidak dapat diubah)
2. Kondensator elektrolit (Electrolit Condenser = Elco)
3. Kondensator variabel (nilai kapasitasnya dapat diubah-ubah)
Pada kapasitor yang berukuran besar, nilai kapasitansi umumnya ditulis dengan angka yang jelas. Lengkap dengan nilai tegangan maksimum dan polaritasnya. Misalnya pada kapasitor elco dengan jelas tertulis kapasitansinya sebesar 100µF25v yang artinya kapasitor/ kondensator tersebut memiliki nilai kapasitansi 100 µF dengan tegangan kerja maksimal yang diperbolehkan sebesar 25 volt.
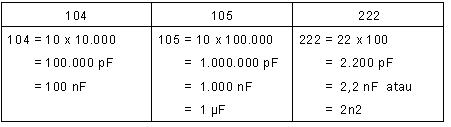
Kapasitor yang ukuran fisiknya kecil biasanya hanya bertuliskan 2 (dua) atau 3 (tiga) angka saja. Jika hanya ada dua angka, satuannya adalah pF (pico farads). Sebagai contoh, kapasitor yang bertuliskan dua angka 47, maka kapasitansi kapasitor tersebut adalah 47 pF. Jika ada 3 digit, angka pertama dan kedua menunjukkan nilai nominal, sedangkan angka ke-3 adalah faktor pengali. Faktor pengali sesuai dengan angka nominalnya, berturut-turut 1 = 10, 2 = 100, 3 = 1.000, 4 = 10.000, 5 = 100.000 dan seterusnya.
Contoh :
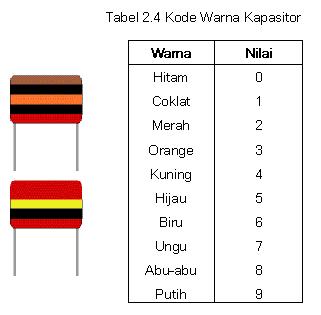
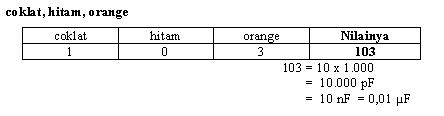
Untuk kapasitor polyester nilai kapasitansinya bisa diketahui berdasarkan warna seperti pada resistor.
Contoh :
Seperti komponen lainnya, besar kapasitansi nominal ada toleransinya. Pada tabel 2.3 diperlihatkan nilai toleransi dengan kode-kode angka atau huruf tertentu. Dengan tabel tersebut pemakai dapat dengan mudah mengetahui toleransi kapasitor yang biasanya tertera menyertai nilai nominal kapasitor. Misalnya jika tertulis 104 X7R, maka kapasitansinya adalah 100nF dengan toleransi +/-15%. Sekaligus diketahui juga bahwa suhu kerja yang direkomendasikan adalah antara -55Co sampai +125Co .
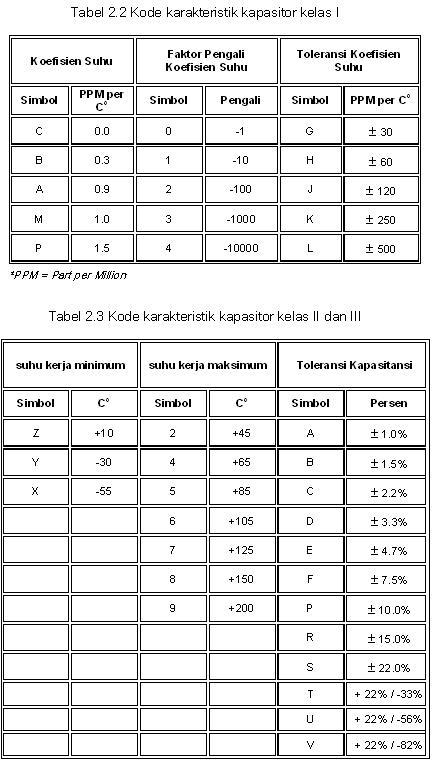
Dari penjelasan di atas bisa diketahui bahwa karakteristik kapasitor selain kapasitansi juga tak kalah pentingnya yaitu tegangan kerja dan temperatur kerja. Tegangan kerja adalah tegangan maksimum yang diijinkan sehingga kapasitor masih dapat bekerja dengan baik. Misalnya kapasitor 10uF25V, maka tegangan yang bisa diberikan tidak boleh melebihi 25 volt dc. Umumnya kapasitor-kapasitor polar bekerja pada tegangan DC dan kapasitor non-polar bekerja pada tegangan AC. Sedangkan temperatur kerja yaitu batasan temperatur dimana kapasitor masih bisa bekerja dengan optimal. Misalnya jika pada kapasitor tertulis X7R, maka kapasitor tersebut mempunyai suhu kerja yang direkomendasikan antara -55Co sampai +125Co. Biasanya spesifikasi karakteristik ini disajikan oleh pabrik pembuat di dalam datasheet.
2.3. Rangkaian Kapasitor
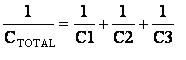
Rangkaian kapasitor secara seri akan mengakibatkan nilai kapasitansi total semakin kecil. Di bawah ini contoh kapasitor yang dirangkai secara seri.
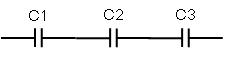
Pada rangkaian kapasitor yang dirangkai secara seri berlaku rumus :
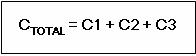
Rangkaian kapasitor secara paralel akan mengakibatkan nilai kapasitansi pengganti semakin besar. Di bawah ini contoh kapasitor yang dirangkai secara paralel.
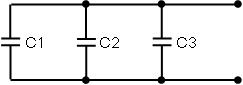
Pada rangkaian kapasitor paralel berlaku rumus :
2.4. Fungsi Kapasitor
Fungsi penggunaan kapasitor dalam suatu rangkaian :
1. Sebagai kopling antara rangkaian yang satu dengan rangkaian yang lain (pada PS = Power Supply)
2. Sebagai filter dalam rangkaian PS
3. Sebagai pembangkit frekuensi dalam rangkaian antenna
4. Untuk menghemat daya listrik pada lampu neon
5. Menghilangkan bouncing (loncatan api) bila dipasang pada saklar
2.5. Tipe Kapasitor
Kapasitor terdiri dari beberapa tipe, tergantung dari bahan dielektriknya. Untuk lebih sederhana dapat dibagi menjadi 3 bagian, yaitu kapasitor electrostatic, electrolytic dan electrochemical.
Kapasitor electrostatic adalah kelompok kapasitor yang dibuat dengan bahan dielektrik dari keramik, film dan mika. Keramik dan mika adalah bahan yang popular serta murah untuk membuat kapasitor yang kapasitansinya kecil. Tersedia dari besaran pF sampai beberapa µF, yang biasanya untuk aplikasi rangkaian yang berkenaan dengan frekuensi tinggi. Termasuk kelompok bahan dielektrik film adalah bahan-bahan material seperti polyester (polyethylene terephthalate atau dikenal dengan sebutan mylar), polystyrene, polyprophylene, polycarbonate, metalized paper dan lainnya.
Mylar, MKM, MKT adalah beberapa contoh sebutan merek dagang untuk kapasitor dengan bahan-bahan dielektrik film. Umumnya kapasitor kelompok ini adalah non-polar.
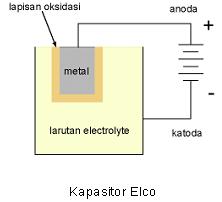
Kelompok kapasitor electrolytic terdiri dari kapasitor-kapasitor yang bahan dielektriknya adalah lapisan metal-oksida. Umumnya kapasitor yang termasuk kelompok ini adalah kapasitor polar dengan tanda + dan – di badannya. Mengapa kapasitor ini dapat memiliki polaritas, adalah karena proses pembuatannya menggunakan elektrolisa sehingga terbentuk kutub positif anoda dan kutub negatif katoda.
Telah lama diketahui beberapa metal seperti tantalum, aluminium, magnesium, titanium, niobium, zirconium dan seng (zinc) permukaannya dapat dioksidasi sehingga membentuk lapisan metal-oksida (oxide film). Lapisan oksidasi ini terbentuk melalui proses elektrolisa, seperti pada proses penyepuhan emas. Elektroda metal yang dicelup ke dalam larutan elektrolit (sodium borate) lalu diberi tegangan positif (anoda) dan larutan electrolit diberi tegangan negatif (katoda). Oksigen pada larutan electrolyte terlepas dan mengoksidasi permukaan plat metal. Contohnya, jika digunakan Aluminium, maka akan terbentuk lapisan Aluminium-oksida (Al2O3) pada permukaannya.
Dengan demikian berturut-turut plat metal (anoda), lapisan-metal-oksida dan electrolyte (katoda) membentuk kapasitor. Dalam hal ini lapisan-metal-oksida sebagai dielektrik. Dari rumus (2) diketahui besar kapasitansi berbanding terbalik dengan tebal dielektrik. Lapisan metal-oksida ini sangat tipis, sehingga dengan demikian dapat dibuat kapasitor yang kapasitansinya cukup besar.
Karena alasan ekonomis dan praktis, umumnya bahan metal yang banyak digunakan adalah aluminium dan tantalum. Bahan yang paling banyak dan murah adalah aluminium. Untuk mendapatkan permukaan yang luas, bahan plat Aluminium ini biasanya digulung radial. Sehingga dengan cara itu dapat diperoleh kapasitor yang kapasitansinya besar. Sebagai contoh 100uF, 470uF, 4700uF dan lain-lain, yang sering juga disebut kapasitor elco.
Bahan electrolyte pada kapasitor tantalum ada yang cair tetapi ada juga yang padat. Disebut electrolyte padat, tetapi sebenarnya bukan larutan electrolit yang menjadi elektroda negatif-nya, melainkan bahan lain yaitu manganese-dioksida. Dengan demikian kapasitor jenis ini bisa memiliki kapasitansi yang besar namun menjadi lebih ramping dan mungil. Selain itu karena seluruhnya padat, maka waktu kerjanya (lifetime) menjadi lebih tahan lama. Kapasitor tipe ini juga memiliki arus bocor yang sangat kecil Jadi dapat dipahami mengapa kapasitor Tantalum menjadi relatif mahal.
- Kapasitor Electrochemical
Satu jenis kapasitor lain adalah kapasitor electrochemical. Termasuk kapasitor jenis ini adalah battery dan accu. Pada kenyataannya battery dan accu adalah kapasitor yang sangat baik, karena memiliki kapasitansi yang besar dan arus bocor (leakage current) yang sangat kecil. Tipe kapasitor jenis ini juga masih dalam pengembangan untuk mendapatkan kapasitansi yang besar namun kecil dan ringan, misalnya untuk aplikasi mobil elektrik dan telepon selular.




